GPU Architecture
The streaming multiprocessor is the core architectural element of the GPU. More SMs means faster GPUs & vice versa. The architectural diagrams on this page are describing a specific generation of the streaming multiprocessor architecture. SMs are composed of cores, so the higher the core count, the more SMs a device contains. The simplest way to increase performance is to add more SMs.
Streaming Multiprocessor Architectures
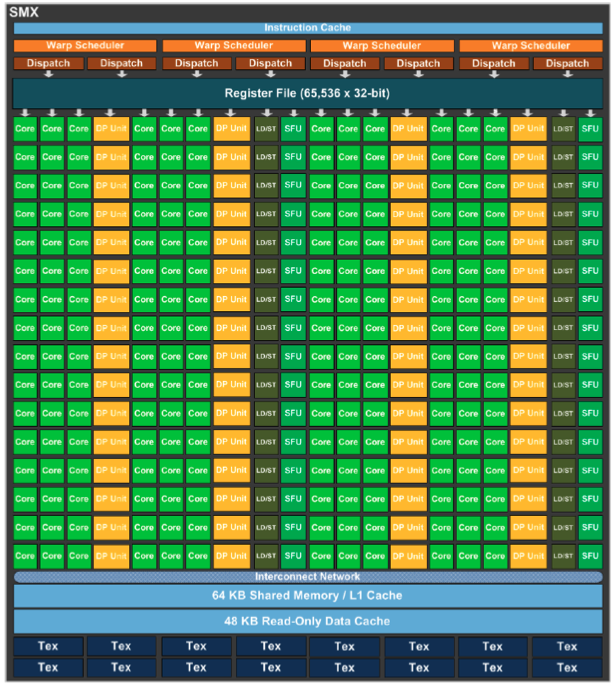
Kepler
Kepler GPUs, CC3.5, have 192 SP units (cores). Single percision units perform floating point multiplications & additions on 32b data. Double percision units do the same on 64b data. A GPU core does less than an ALU. The closest analog for a processor core in a GPU is the streaming multiprocessor. GPUs are basically load/store architectures, they load data into cores, calculate in the registers & store it back to shared & global memory. Kepler’s have 4 warp schedulers which are dual-issue capable, i.e. issue 2 adjacent instructions in a single clock cycle. They are instruction dispatchers at the SM level. Newer iterations will have more SMXs & memory, e.g. K20: 13 SMX’s & 5GB.
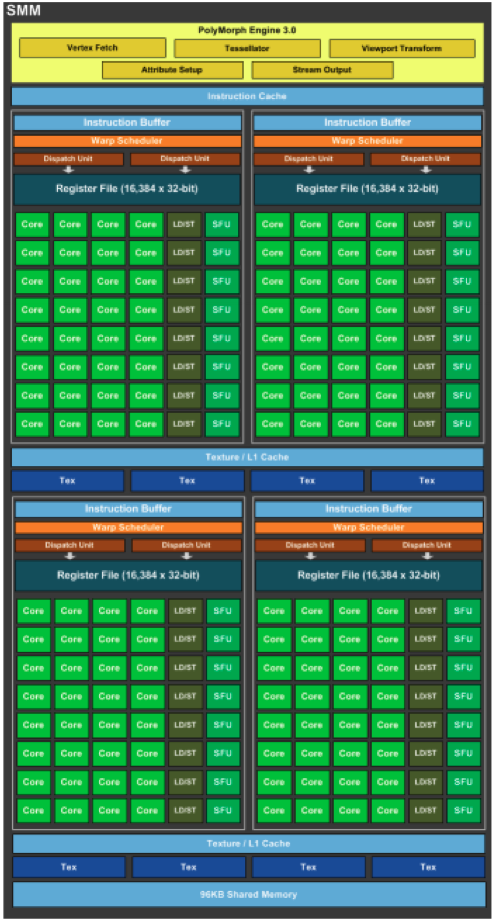
Maxwell to Pascal
Compute Capability, CC5.2 for Maxwell & CC6.1 for Pascal. The ratio of SP to DP throughput is an in important distinction between generations of GPU architectures. From Kepler to Maxwell & Pascal, this ratio increased, the newer generations having less DP units (Kepler: 1to3). M40, P40, P4 architectures are from the Maxwell & Pascal generation of architectures. They had ~twice as many SMs & ~2-4 times as much memory as the Kepler generation.
Pascal to Volta
Pascal CC6.0 & Volta CC7.0 added FP16 capability which were twice as fast as SP operations. Tensor cores were also added which have instructions to do matrix*matrix multiplication. Tensor cores gave a 5-10x speedup for matrix operations. P100 & V100: ~50-80SMs & 16-32GB of memory.

Turing
…
Jetson
Jetson is a ==system on a chip= environment in which the GPU & the host share exactly the same DRAM memory. The whole idea of memory allocation is different, i.e. there is only one allocation. Managed|Unified memory handles this case as well.
GPU Execution Model
SMs are analogous to multiprocessors which are the hardware equivalent of thread blocks. To take advantage of multiple SMs, we need multiple thread blocks which are bound to one SM.
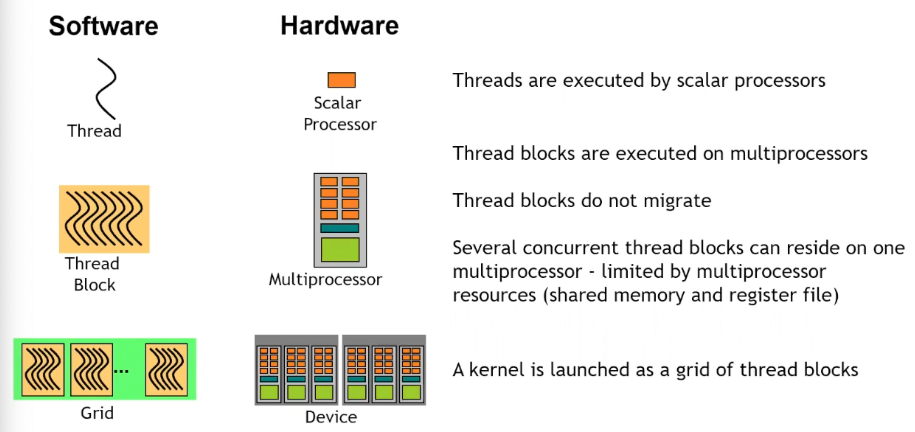
A warp is equal to 32 threads. A thread block can have many warps. Instructions are issued at the warp level. This means that each instruction is executed in lock-step by 32 threads at a time.
Launch Configuration
The launch configuration specifies how many threads the grid has in it & how many blocks those threads reside in, i.e. it specifies the number of blocks & the number of threads per block.