Parallel Algorithms
Sequential algorithms specify a sequence of steps that each perform one operation, but Parallel algorithms perform multiple operations per step. There are two core types of problems that are solved by parallel algorithms, transformations & reductions. Generally, the approach to transformation problems is to assign one thread per output due to the fact that these problems generally have input size equal to output size. Reduction problems are fundamentally different & generally more difficult to solve because they reduce the size of the input to produce the output.
Atomics
Reduction problems run into the scenario in which many threads need to modify the same memory but this cannot happen successfully at the same time. Nvidia GPUs have many instructions that facilitate atomic operations. These instructions are limited to int, unsigned, float, etc… data types. Atomic operations happen by a special mechanism in the L2 cache. Atomic operations return the old value before the atomic update & are RMW operations.
- atomicMax/Min
- atomicAdd/Sub
- atomicInc/Dec
- atomicExch/CAS - swap values & conditional swap
- atomicAnd/Or/Xor
There are many possible Kernel Optimizations.
Parallel Reductions
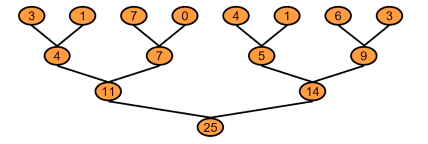
The most basic approach for parallel redutions is a tree-based method. The way to accomplish this is through global sychronization, i.e. synchronization across the entire grid. One way to achieve this is to take advantage of CUDAs default behavior on kernel launch which is to synchronize globally. Other methods are threadblock level reduction, threadblock draining, & cooperative groups which provide a set of primitives for thread cooperation & decomposition. If our goal is to sum the values in an array, we can represent that operation in a tree.
Parallel Sweep Reduction
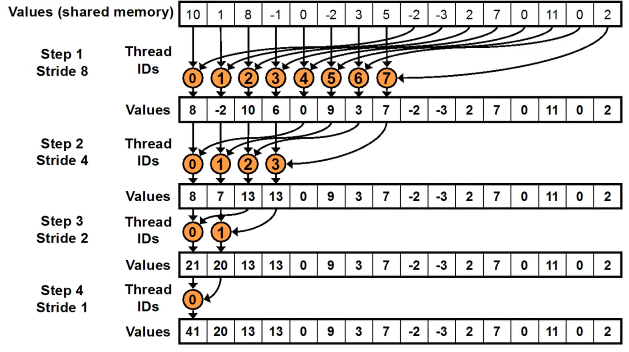
Looking at the tree, we can come up with a very simple method for the sub problems that fit within a thread block known as a parallel sweep reduction for which an algorithm is given with a thread diagram. Sequential addressing is achieved here by the threads which means this algorithm is bank conflict free. Sequential addressing occurs when threads read & write from shared memory at each index one thread next to the other which means that warps & blocks can share retrieved sectors.
for (unsigned int s = blockDim.x / 2; s > 0; s >>= 1) {
if (tid < s) {
sdata[tid] += sdata[tid + s];
}
_syncthreads();
}
Grid Stride Loops
Sequential addressing gets us thread block level sums, but we’d like to be able to scale sequential addressing to some arbitrarily large dataset efficiently while maintaining coalesced loads & stores & efficient shared memory usage. The way to generalize to arbitrarily large data is through the use of a grid stride loop which assigns threads to the same memory locations over the entire global data array.
int idx = threadIdx.x + blockDim.x * blockIdx.x;
while (idx < N) {
sdata[tid] += gdata[idx]; // tid == threadIdx.x
idx += gridDim.x * blockDim.x; // grid width (threads/grid)
}Reduce
__global__ void reduce(float* gdata, float* out) {
__shared__ float sdata[BLOCK_SIZE];
int tid = threadIdx.x;
sdata[tid] = 0.0f;
size_t idx = threadIdx.x + blockDim.x * blockIdx.x;
// grid stride loop to sum each threadIdx over all grids into shared memory
while (idx < N) {
sdata[tid] += gdata[idx];
idx += gridDim.x * blockDim.x; // grid width (threads/grid)
}
// parallel sweep reduction to sum all threadIdx across grids into one array of block sums
// i.e. this only sums the blockIdx block in all grid strides
for (unsigned int s = blockDim.x / 2; s > 0; s >>= 1) {
__syncthreads();
if (tid < s)
sdata[tid] += sdata[tid + s];
}
//---------------------------------------------------------------
// The result of the reduction is written by the first thread
// for each block of threads ... Some host program or other kernel
// would need to perform another reduction on the output
// or some other method that uses atomic operations is required.
// The result of that reduction would be the sum of block sum,
// the block sums having included every blockIdx in all grid strides.
// if (tid == 0)
// out[blockIdx.x] = sdata[0];
//---------------------------------------------------------------
// Instead, we perform an atomicAdd across thread blocks to avoid more kernel invocations.
// Here, sdata[0] is block level & holds the block sum across all grid strides.
// Since we have reduced the input all the way down to the NBLOCKS|GRID_SIZE, we only need
// that many atomic operations.
if (tid == 0)
atomicAdd(out, sdata[0]);
}Block Level Striding Row Sums
const size_t DSIZE = 16384; // matrix side dimension
const int BLOCK_SIZE = 256; // CUDA maximum is 1024
// matrix row-sum kernel
__global__ void row_sums(const float* A, float* sums, size_t ds) {
int idx = blockIdx.x;
if (idx < ds) {
__shared__ float smem[BLOCK_SIZE];
int tid = threadIdx.x;
smem[tid] = 0.0f;
int blockOffset = tid;
// block stride loop
while (blockOffset < ds) {
// idx * ds -> iterates rows
// + blockOffset -> strides block length in each row
smem[tid] += A[idx * ds + blockOffset];
blockOffset += blockDim.x;
}
for (unsigned int p = blockDim.x >> 1; p > 0; p >>= 1) {
__syncthreads();
if (tid < p)
smem[tid] += smem[tid + p];
}
// idx == #rows
if (tid == 0)
sums[idx] = smem[0];
}
}Max Finding Reduction
const size_t N = 8ULL * 1024ULL * 1024ULL; // unsigned long long
const int BLOCK_SIZE = 256; // CUDA maximum is 1024
__global__ void reduce(float* gdata, float* out, size_t n) {
__shared__ float sdata[BLOCK_SIZE];
int tid = threadIdx.x;
sdata[tid] = 0.0f;
size_t idx = threadIdx.x + blockDim.x * blockIdx.x;
// Grid Stride
while (idx < n) {
// CUDA does not allow std fns but does have a non atomic MAX|MIN
sdata[tid] = max(sdata[tid], gdata[idx]);
idx += gridDim.x * blockDim.x;
}
// parallel sweep reduction
for (unsigned int s = blockDim.x / 2; s > 0; s >>= 1) {
__syncthreads();
if (tid < s)
sdata[tid] = max(sdata[tid], sdata[tid + s]);
}
// given a multiple block input, output needs to be passed back into the
// reduce kernel again to be reduced all the way to 1 float
if (tid == 0)
out[blockIdx.x] = sdata[0];
}Warp Shuffle
Parallel reductions use shared memory for intra thread communication. This means that each thread has to read & write from shared memory, but what if threads could communicate directly?
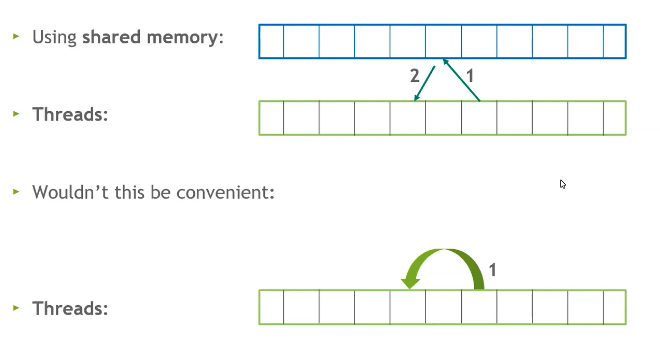
It turns out there is a mechanism for this called the Warp Shuffle in which threads in a warp can communicate directly with each other. There are a few intrinsic operations that exist to facilitate the warp shuffle.
1. __shfl_sync(): copy from lane ID
2. __shfl_xor_sync(): copy from calculated lane ID
3. __shf_up_sync(): copy from delta/offset lower lane
4. __shfl_down_sync(): copy from delta/offset higher laneSource & destination threads need to participate, there is a mask parameter used in these operations that selects which warp lanes will participate. Warp shuffle can reduce or eliminate shared memory usage which can be an occupancy bottleneck, it can reduce the number of instructions used, & reduce the level of explicit synchronization. There are other tools available, e.g. a value can be broadcast to all threads in a warp via a single instruction, warp level prefix sums & sorting are possible, & atomic aggregation is possible, i.e. instead of 32 atomic operations, we can aggregate across a warp & then have one thread perform the atomic operation as shown below.
__global__ void reduce_ws(float* gdata, float* out) {
__shared__ float sdata[32];
int tid = threadIdx.x;
int idx = threadIdx.x + blockDim.x * blockIdx.x;
float val = 0.0f;
unsigned mask = 0xFFFFFFFFU;
int lane = threadIdx.x % warpSize;
int warpID = threadIdx.x / warpSize;
// grid stride loop
while (idx < N) {
val += gdata[idx];
idx += gridDim.x * blockDim.x;
}
// warp-shuffle reduction ->
for (int offset = warpSize / 2; offset > 0; offset >>= 1)
val += __shfl_down_sync(mask, val, offset);
// warp results to shared memory
if (lane == 0)
sdata[warpID] = val;
__syncthreads();
if (warpID == 0) {
// reload val from shared mem if warp existed, an additional warp
// requires >= 32 threads
val = (tid < blockDim.x / warpSize) ? sdata[lane] : 0;
// warp-shuffle reduction ->
for (int offset = warpSize / 2; offset > 0; offset >>= 1)
val += __shfl_down_sync(mask, val, offset);
//
if (tid == 0)
atomicAdd(out, val);
}
}
Vector Addition
__global__ void vectorAddition(const float* a, const float* b, float* c,
int n) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if (idx < n) {
c[idx] = a[idx] + b[idx];
}
}
Matrix Multiplication
Naive Solution
This naive solution does not use shared memory.
__global__ void mmul(const float* a, const float* b, float* c, N) {
int idx = blockDim.x * blockIdx.x + threadIdx.x;
int idy = blockDim.y * blockIdx.y + threadIdx.y;
if ((idx < N) && (idy < N)) {
float temp = 0;
for (int i = 0; i < N; i++)
temp += a[i * N + i] * b[i * N + i];
c[idy * N + idx] = temp;
}
}Shared Memory Solution
const int N = 8192;
const int BLOCK_SIZE = 32;
const int NBLOCKS = (N + BLOCK_SIZE - 1) / BLOCK_SIZE;
__global__ void mmul(const float* a, const float* b, float* c, N) {
__shared__ float sma[BLOCK_SIZE][BLOCK_SIZE];
__shared__ float smb[BLOCK_SIZE][BLOCK_SIZE];
int idx = threadIdx.x + blockDim.x * blockIdx.x;
int idy = threadIdx.y + blockDim.y * blockIdx.y;
if (idx < N && idy < N) {
float t = 0;
for (int i = 0; i < NBLOCKS; i++) {
sma[threadIdx.y][threadIdx.x] =
a[idy * N + (i * BLOCK_SIZE + threadIdx.x)];
smb[threadIdx.y][threadIdx.x] =
b[(i * BLOCK_SIZE + threadIdx.y) * N + idx];
__syncthreads();
for (int k = 0; k < BLOCK_SIZE; k++) {
// dot product of row & column
t += sma[threadIdx.y][k] * smb[k][threadIdx.x];
__syncthreads();
}
}
c[idy * N + idx] = t;
}
}
Matrix Row/Column Sums
const size_t DSIZE = 16384; // matrix side dimension
const int BLOCK_SIZE = 256; // CUDA maximum is 1024
const int GRID_SIZE = (DSIZE + BLOCK_SIZE - 1) / BLOCK_SIZE;
__global__ void rowSum(const float* A, float* S, size_t ds) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if (idx < ds) {
float sum = 0.0f;
for (size_t i = 0; i < ds; i++)
// one thread for each row sums over ds elements next to each other in gmem
// but it is desirable for many threads to access gmem next to each other instead to
// allow consolidation of global memory requests
// e.g. if all 32 threads in a warp access 4B memory sequentially, & segments are 128B,
// then we request 1 segment & have `(128B/(1x128B))x100=100`% gmem bus utilization.
sum += A[idx * ds + i];
S[idx] = sum;
}
}
__global__ void columnSum(const float* A, float* S, size_t ds) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if (idx < ds) {
float sum = 0.0f;
for (size_t i = 0; i < ds; i++)
// each warp will have adjacent global memory accesses by its threads
// which results in high gmem bus utilization.
sum += A[i * ds + idx];
S[idx] = sum;
}
}
bool validate(float* data, size_t sz) {
for (size_t i = 0; i < sz; i++)
if (data[i] != (float)sz) {
printf("results mismatch at %lu, was: %f, should be: %f\n", i, data[i],
(float)sz);
return false;
}
return true;
}
int main() {
// prepare data
float *h_A, *d_A, *h_S, *d_S;
h_A = new float[DSIZE * DSIZE]();
h_S = new float[DSIZE]();
for (int i = 0; i < DSIZE; i++) {
for (int j = 0; j < DSIZE; j++)
h_A[i * DSIZE + j] = 1.0f;
}
// allocate device memory
cudaMalloc(&d_A, DSIZE * DSIZE * sizeof(float));
cudaMalloc(&d_S, DSIZE * sizeof(float));
// copy data to device
cudaMemcpy(d_A, h_A, DSIZE * DSIZE * sizeof(float), cudaMemcpyHostToDevice);
cudaMemcpy(d_S, h_S, DSIZE * sizeof(float), cudaMemcpyHostToDevice);
// launch kernels & check results
rowSum<<<GRID_SIZE, BLOCK_SIZE>>>(d_A, d_S, DSIZE);
cudaMemcpy(h_S, d_S, DSIZE * sizeof(float), cudaMemcpyDeviceToHost);
if (validate(h_S, DSIZE))
printf("Row sums are correct!\n");
// launch kernels & check results
columnSum<<<GRID_SIZE, BLOCK_SIZE>>>(d_A, d_S, DSIZE);
cudaMemcpy(h_S, d_S, DSIZE * sizeof(float), cudaMemcpyDeviceToHost);
if (validate(h_S, DSIZE))
printf("Column sums are correct!\n");
}
1D Stencil
Stencil operations are common in scientific calculations & are also known as window opertations. 1D Stencils have radii on either side of their center which is not included in those radii. The stencil slides across the input transforming or reducing it into the output.
Shared memory is physically included on the chip die & is faster than global memory which is DRAM attached to the GPU. DRAM access is by memory segments, but shared memory access is at the byte level. Shared memory is a.k.a. on-chip memory & is a block level resource. GPUs also have on-chip caches which are a separate concept. One way to accelerate any computation that has data reuse, e.g. sliding a 1D stencil across some array, is to use memory that is at a higher level in the memory hierarchy a.k.a. closer to the processor which would take some number of redundant data access & move it closer to the calculation. So, we can use shared memory, denoted by the ==_shared_ attribute, as a block level cache. When we load our block input into shared memory, we need to include the left & right halos that the stencil needs for each output element. Then, each block needs blockDim.x + 2 * radius input elements loaded into shared memory from global memory. This concept is commonly implemented in what is called a stencil kernel==, e.g. the following.
#define N 4096
#define RADIUS 3
#define BLOCK_SIZE 16
__global__ void stencil1D(int* in, int* out) {
// static memory allocation
__shared__ int sharedMemory[BLOCK_SIZE + 2 * RADIUS];
int gIdx = threadIdx.x + blockIdx.x * blockDim.x;
int lIdx = threadIdx.x + RADIUS;
// Read input elements into shared memory
sharedMemory[lIdx] = in[gIdx];
if (threadIdx.x < RADIUS) {
sharedMemory[lIdx - RADIUS] = in[gIdx - RADIUS];
sharedMemory[lIdx + BLOCK_SIZE] = in[gIdx + BLOCK_SIZE];
}
// Synchronize (ensure all the data is available)
__syncthreads();
int ws = 0;
for (int offset = -RADIUS; offset <= RADIUS; offset++) {
ws += sharedMemory[lIdx + offset]
}
out[gIdx] = ws;
/*
static shared memory allocation
dynamic allocation is possible
stencil1D<<<GRID_SIZE, BLOCK_SIZE, SHARED_MEMORY_BYTES>>>
__shared__ int temp[];
*/
}You can see from the stencil kernel that there is no guarantee about which order or times threads will execute at, so we have to ensure all shared memory has been allocated. The command, syncthreads(), is a block level synchronization method known as a barrier that forces all threads to reach it before any may proceed. Usually, syncthreads() is not called within conditional logic.