Manipulation
What is robotic manipulation?
Robotic manipulation refers to the way robots interact with the open world around them. It is infinitely more complicated that just grasping objects or the pick & place task. This review paper by Matthew Mason describes robotic manipulation exhaustively (via Russ Tedrake’s Manipulation Course).
Why do we predominantly address robotic manipulation from the kinematics perspective?
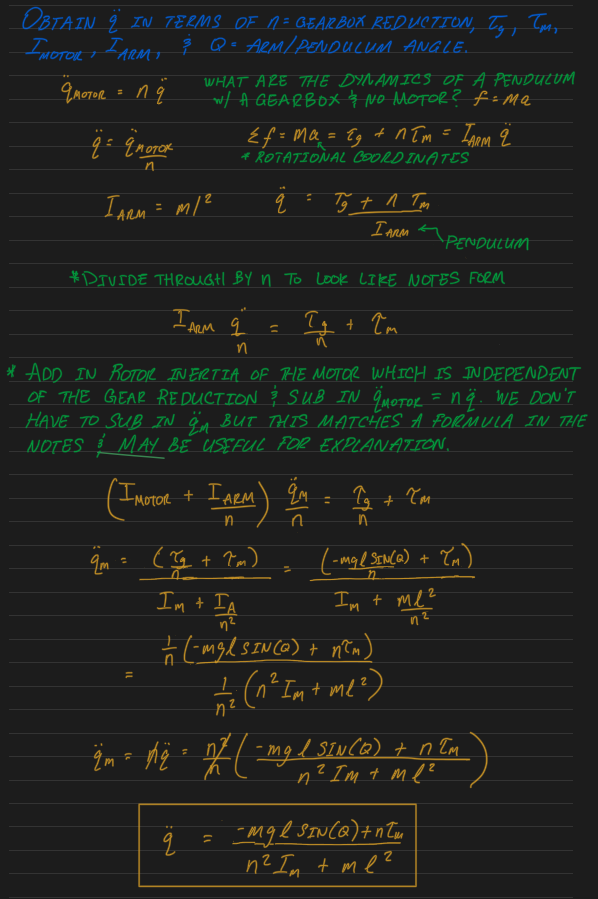
There is a fundamentally important concept to understand w.r.t robot manipulation expressed in an early exercise of Tedrake’s course, i.e. motors with gear reductions change the dynamics of control from direct drive state-space dynamics, in which torque due to gravity & the inertia of the arm (e.g.) play important parts in determining state over time, to gearbox influenced dynamics, in which the torque of the motor & its rotary inertia dominate the dynamics & therefore turn the motor torque control input into an excellent mechanism of control. The following equations illustrate this:
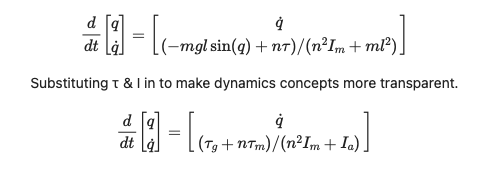
Insight is available by analysis of the state-space dynamics equation for the pendulum driven by the motor with a gearbox. Where n=1, we model a direct drive system with no gearbox, & we have a numerater with equal weight given to τ_g & τ_m & a denominator which equally weights Ι_m & Ι_a, i.e. no term dominates & control is more complicated. V.S. letting n be >1 which causes the torque of the motor to dominate the numerator & the rotor inertia of the motor to dominate the denominator, i.e.; the dynamics of the motor begin to dominate the overal dynamics of the system leading to more simple control. The derivation of the equations above is as follows.